
Anticipating a lot of spare time and with rare good foresight, I bought an electric bicycle at the beginning of the COVID19 lockdown. I wanted a folding model so that it could be put into the car trunk and big wheels because the small-wheel folding bikes look strange to me. The Ancheer 26-inch folding mountain …
Continue reading
Permanent link to this article: https://w4krl.com/e-bike-energy-consumption/

Soon after I got my Ancheer 26-inch folding electric bicycle, I built a data logger that directly measures battery voltage and current, and calculates wattage. It also records calculated energy consumption in terms of ampere-hours and watt-hours. It records this data on a microSD card every second. The datafile can be opened in a spreadsheet …
Continue reading
Permanent link to this article: https://w4krl.com/e-bike-logger/
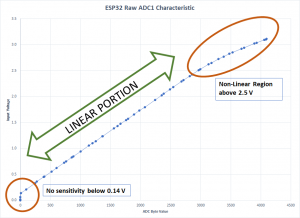
The ESP32 is a powerful microcontroller with many input/output ports. Specifically, it contains two 12-bit multiplexed analog to digital converters (ADCs) for a total of 18 channels. ADC1 is attached to eight GPIOs from 32 to 39. ADC2 is attached to 10 GPIOs (0, 2, 4, 12 to 15 and 25 to 27). There are …
Continue reading
Permanent link to this article: https://w4krl.com/esp32-analog-to-digital-conversion-accuracy/
The Zambretti Forecaster is a weather forecasting tool in the form of a circular slide rule introduced in 1920. It claims to accurately predict near-term weather based on barometric pressure, the trend in the pressure (rising, steady, or falling), and wind direction. It relies on the fundamental meteorology of pressure fronts. Watch any TV weather forecast and …
Continue reading
Permanent link to this article: https://w4krl.com/zambretti-forecaster/

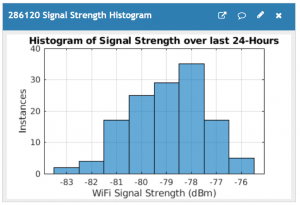
The amateur radio Automatic Packet Reporting System (APRS) is typically used for position and weather reporting. It can also handle eight digital and five analog telemetry channels. The IoT Kits© solar-powered weather stations have four APRS analog telemetry channels for LiPo cell voltage, time awake, WiFi signal strength, and light intensity. Four digital channels are used …
Continue reading
Permanent link to this article: https://w4krl.com/sending-aprs-analog-telemetry-the-basics/

An instrument shelter provides a flow of air around weather sensors while protecting them from direct sunlight and rain. Without a shield, the sun can heat the temperature sensor giving a false high-temperature reading. Professional weather stations use a large louvered box called a Stevenson Screen that is built to specific dimensions for standardized weather …
Continue reading
Permanent link to this article: https://w4krl.com/diy-instrument-shield/

[rl_gallery id=”1540″] The D1M-WX1 and D1S-WX1 solar-powered weather stations heat up in direct sunlight giving an incorrectly high-temperature reading. Early results from testing an Acurite solar radiation shield are very good. The shield is available from several online vendors. Check around for a good price as the same item sells for $10 to $60 from …
Continue reading
Permanent link to this article: https://w4krl.com/solar-radiation-shield-under-test/
Most electronic projects operate on low voltage direct current. This is often provided by a USB connection or a battery. There are several possibilities to power a project from the 120 Vac power line. A common way is to use a wall adapter (wall wart) and feed low voltage direct current to your project through …
Continue reading
Permanent link to this article: https://w4krl.com/power-supply-measurements/
The ESP8266 using the Arduino Core reports Wi-Fi status with the WiFi.status() function. The D1M-WX1 Weather Station attempts to connect to Wi-Fi every 250 milliseconds until the “Connect” status is found. If this does not happen after 15 attempts, it prints the status to the Serial Monitor. Normally, the LED on the ESP8266 flashes five or six …
Continue reading
Permanent link to this article: https://w4krl.com/di-mini-esp8266-wi-fi-status-codes/
The key to using solar power in an Internet of Things project is to put the microcontroller unit into sleep modeafter the sensors are read and the data posted to your IoT server. The NodeMCU and the Wemos D1 WiFi, a larger profile that mimics the Arduino UNO form, reliably woke from deep sleep. So …
Continue reading
Permanent link to this article: https://w4krl.com/sleep-mode-for-the-wemos-d1-mini/
Load more


